Brakes for humanoid robots: what to consider?
Space-saving spring-loaded brake for joints
The use of humanoid robots is becoming an increasingly attractive option for many manufacturing companies. The advantages of these robots speak for themselves: a high degree of flexibility in terms of the workstation, whilst maintaining consistent precision. However, before they can actually be put into operation, there are technical challenges to overcome, including the selection of the appropriate brake solution. An optimised spring-loaded brake from KEB Automation provides the solution here.

Robotic applications have already proven their worth in many industrial settings. Industrial robots and cobots, for instance, perform tasks in assembly, transport and many other areas. However, humanoid robots are also becoming increasingly interesting for industry – machines modelled on the human body that perform tasks using sensors and artificial intelligence. Furthermore, they are capable of interacting with humans and working in a variety of environments.
Advantages of humanoid robots
And this is precisely where humanoid robots differ from traditional industrial robots. For whilst industrial robots, designed for repeatability, are used in predefined environments tailored to the robots themselves, humanoid robots are adapted to the human world. Another fundamental difference lies in flexibility: conventional robots carry out tasks with the highest precision, exactly as they have been programmed in detail beforehand. If a different task is to be performed, new programming is required. Humanoid robots, by contrast, can be seen as ‘all-rounders’ that are versatile and constantly learning.
Against this backdrop, sectors such as the automotive industry, logistics and metalworking offer potential for the use of humanoid robots. Here, they can efficiently take on various transport and handling tasks. These robots are also an option in manufacturing, particularly as workplaces here are designed for humans and tasks may vary, for example in assembly or machine loading. The robots are also suitable for use outside industry: in the healthcare sector, they can assist nursing staff, or in the catering industry, they can take on service tasks.
Technical requirements
With the growing interest in humanoid robots, the question of what technical requirements are essential for smooth and safe operation is being asked more and more frequently. Alongside sensors, gripping systems, artificial intelligence and motors, brakes play a significant role here. “The flexibility of a humanoid robot requires that it be designed to be as flexible as possible and feature movable parts. This is where the axes and joints are located, which are held securely in position with the help of KEB brakes,” says Kevin Zysk, Head of Sales for Brakes and Clutches at KEB. This not only keeps the robot’s arms or legs under control, but also prevents or slows down uncontrolled movements in the event of faults or a power cut.
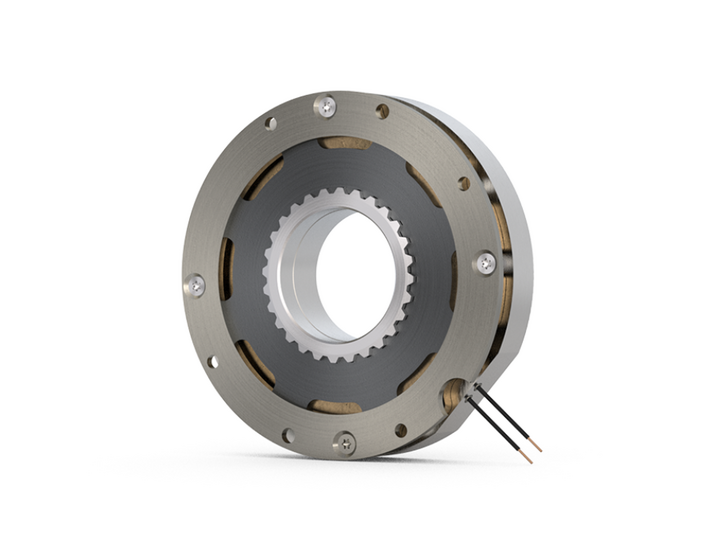
When selecting the appropriate braking solution from KEB’s portfolio, special requirements must be taken into account due to the robot’s dimensions. This is because, in the area of a moving component, space must be found not only for the actuator, motor, encoder or gearbox, but also for the brake. Therefore, brakes with a flat design are required, such as the spring-applied brake COMBISTOP S1 Flat. The holding brake features a patented friction system and is around 50 per cent smaller than conventional spring-applied brakes with similar torque and diameter.
“The COMBISTOP S1 Flat not only ensures a particularly space-saving installation, but also delivers a high torque of up to 10.8 Nm with low holding current,” says Zysk. “If necessary, cables can also be routed through the brake, which increases the robot’s mobility.”
Low power consumption, high material independence
The low power consumption should also not be underestimated in practice, as the brake absorbs energy via various joints and humanoid robots are usually battery-powered. A special feature of the COMBISTOP S1 Flat: the brake does not require rare earths, yet delivers performance comparable to that of a permanent magnet brake. This provides greater planning reliability due to its material independence. Thanks to the plug-and-play system, the S1 Flat is easy to install, and commissioning can be carried out in no time at all thanks to the air gap being pre-set for installation.
“Humanoid robots are complex. As a result, a standard brake is rarely an option. Instead, we discuss the specific requirements with our customers and thus create tailor-made solutions based on existing standard products,” says Zysk.
